ADC
STM32F10x ADC 模数转换器原理、配置与标准库单通道/多通道采集示例
对应江协科技 STM32 入门教程 ADC 章节。本文在视频要点基础上补充规则组/注入组、转换模式、时钟与采样时间、电压换算及代码流程说明,便于查阅与二次开发。
ADC 简介
- ADC(Analog-to-Digital Converter,模数转换器)将引脚上连续变化的模拟电压转换为内存中的数字量,是模拟电路与数字电路之间的桥梁。
- STM32F103 内置 12 位逐次逼近型 ADC,最高理论分辨率 4096 档(0~4095)。
- 参考电压 VREF+ 通常接 3.3 V(与 VDDA 一致),输入电压 0~3.3 V 对应数字量 0~4095。
- 18 个输入通道:16 路外部引脚 + 内部温度传感器 + 内部参考电压 VREFINT(具体可用通道因芯片型号而异)。
- 提供 规则组(Regular) 与 注入组(Injected) 两套转换序列;入门示例主要用规则组。
- 模拟看门狗:可监测电压是否超出设定高低阈值,超限产生中断(过压/欠压保护)。
| 项目 | STM32F103 典型参数 |
|---|---|
| 分辨率 | 12 位 |
| 转换结果 | 0~4095 |
| 输入电压 | 0~VREF+(通常 3.3 V) |
| ADC 时钟 | 最高 14 MHz(需分频配置) |
| 最短转换时间 | 约 1 μs(14 MHz、1.5 周期采样时) |
| 芯片实例 | F103C8 等资源:ADC1、ADC2(无 ADC3) |
与 GPIO 的关系:ADC 采集引脚必须配置为 模拟输入(AIN),此时数字输入/输出缓冲器断开,引脚电压直接进入 ADC 采样保持电路。详见 GPIO 中「模拟输入」模式。
逐次逼近型 ADC
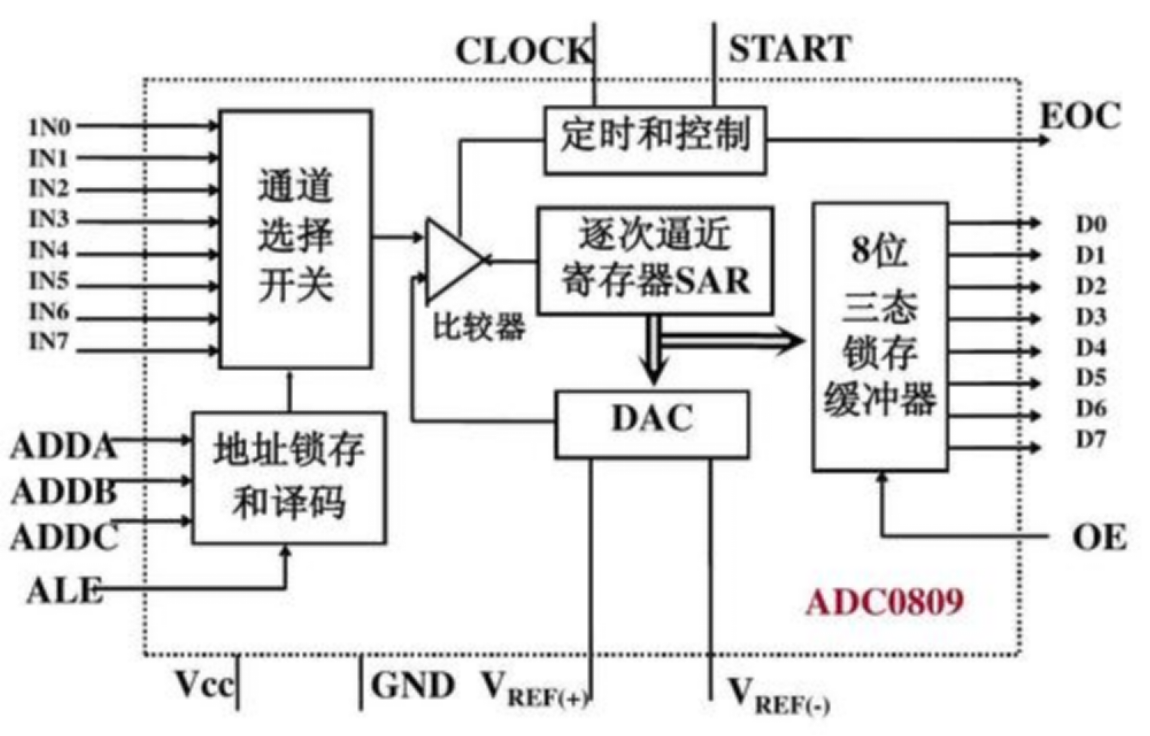
什么是逐次逼近型 ADC?
逐次逼近型 ADC(SAR ADC,Successive Approximation Register ADC)是 MCU 内置 ADC 的常见结构。核心思想是:用内部 DAC 逐步产生比较电压,与输入电压比较,从高位到低位逐位确定数字输出。
工作原理简述:
- 采样保持(S/H) 电路锁定当前引脚电压。
- SAR 从最高位开始,依次假设该位为 1,DAC 输出对应电压。
- 比较器判断 DAC 输出与输入电压大小:输入更大则保留该位为 1,否则清 0。
- 12 位 ADC 重复 12 轮,得到 0~4095 的数字量。
ADC 框图
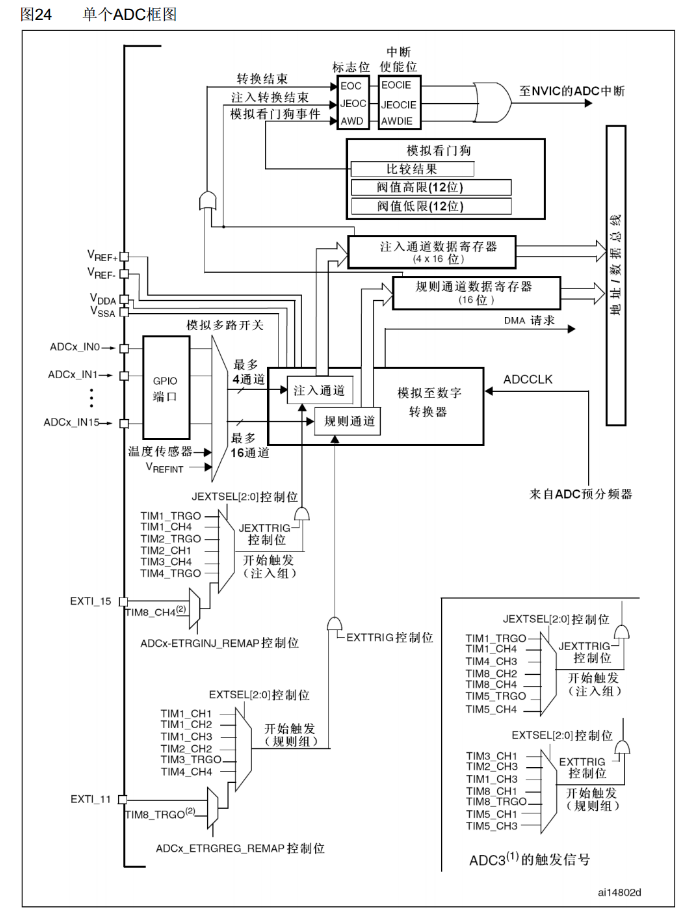
框图体现数据流:多路模拟开关 → 采样保持 → 比较器 + SAR + DAC → 数字结果寄存器。
规则组/注入组各自有序列寄存器,决定「先采哪几个通道」;触发单元决定「何时开始一轮转换」。
ADC 基本结构
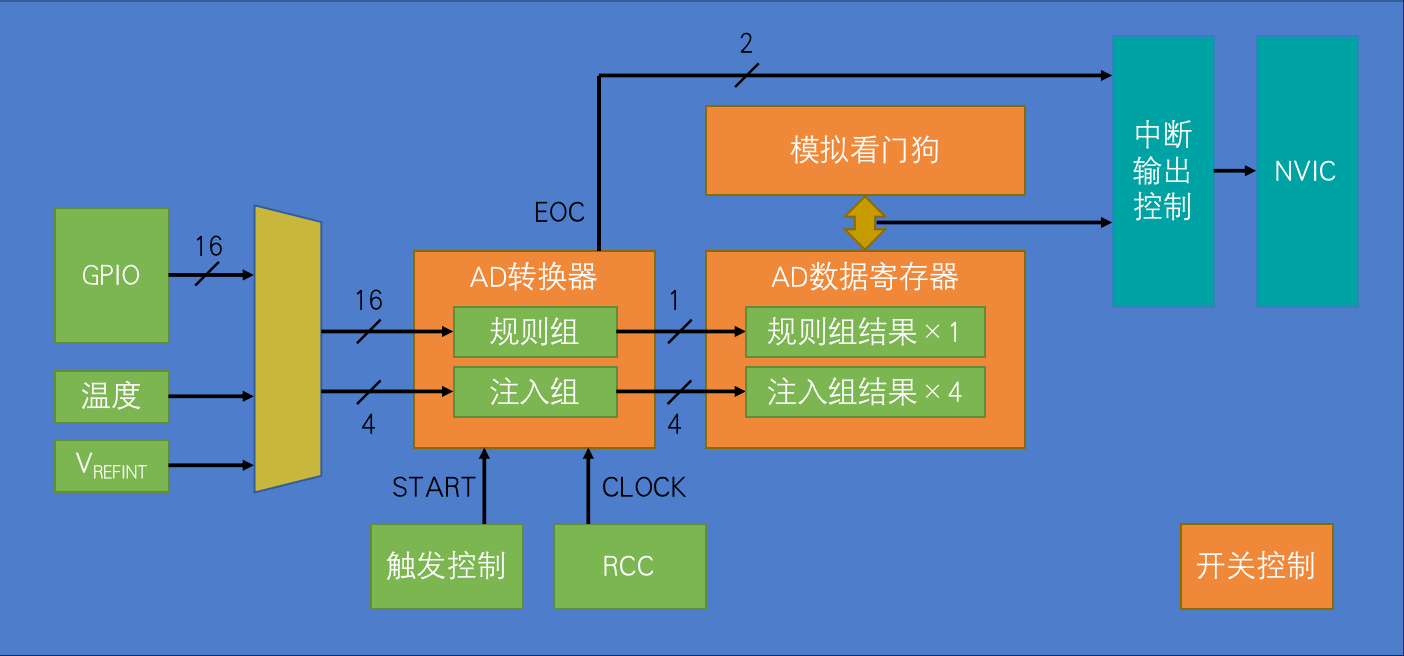
理解要点:
- 序列(Sequence):规则组最多 16 个通道排队转换;注入组最多 4 个,且可打断规则组。
- 数据寄存器 DR:转换完成后结果写入
ADC1->DR(规则组)或JDRx(注入组)。 - EOC 标志:End Of Conversion,转换结束置位,软件或 DMA 据此读数。
输入通道
| 通道 | ADC1 | ADC2 | ADC3 |
|---|---|---|---|
| 通道0 | PA0 | PA0 | PA0 |
| 通道1 | PA1 | PA1 | PA1 |
| 通道2 | PA2 | PA2 | PA2 |
| 通道3 | PA3 | PA3 | PA3 |
| 通道4 | PA4 | PA4 | PF6 |
| 通道5 | PA5 | PA5 | PF7 |
| 通道6 | PA6 | PA6 | PF8 |
| 通道7 | PA7 | PA7 | PF9 |
| 通道8 | PB0 | PB0 | PF10 |
| 通道9 | PB1 | PB1 | |
| 通道10 | PC0 | PC0 | PC0 |
| 通道11 | PC1 | PC1 | PC1 |
| 通道12 | PC2 | PC2 | PC2 |
| 通道13 | PC3 | PC3 | PC3 |
| 通道14 | PC4 | PC4 | |
| 通道15 | PC5 | PC5 | |
| 通道16 | 温度传感器 | ||
| 通道17 | 内部参考电压 |
说明:
- STM32F103C8 仅有 ADC1、ADC2,无 ADC3;引脚以表中 ADC1 列为准。
- 同一时刻 多路外部通道通过内部多路开关轮流接入 SAR,不是并行采样。
- 通道 16、17 为片内信号,读温度或校准参考电压时使用,无需配置外部 GPIO 为模拟输入(需使能对应内部通道)。
- 使用 ADC 的引脚不能同时作数字 GPIO 输出,否则影响采样精度。
规则组与注入组
| 对比项 | 规则组(Regular) | 注入组(Injected) |
|---|---|---|
| 通道数 | 最多 16 个 | 最多 4 个 |
| 数据寄存器 | 1 个 DR | 4 个 JDR1~JDR4 |
| 优先级 | 低 | 高,可打断规则组 |
| 典型用途 | 电位器、多传感器轮询 | 电机电流瞬时采样、过流保护 |
| 入门示例 | ✅ 本文重点 | 进阶再学 |
江协教程与下文代码均使用 规则组 + 软件触发。
转换模式
转换行为由两个独立开关组合决定:
| 连续转换 | 扫描模式 | 行为 |
|---|---|---|
| 关闭 | 关闭 | 单次、单通道:软件触发一次,转换一个通道后停止 |
| 开启 | 关闭 | 连续、单通道:自动反复转换同一通道 |
| 关闭 | 开启 | 单次、多通道:触发一次,按序列扫完所有通道后停止 |
| 开启 | 开启 | 连续、多通道:自动循环扫描序列 |
单次转换,非扫描模式
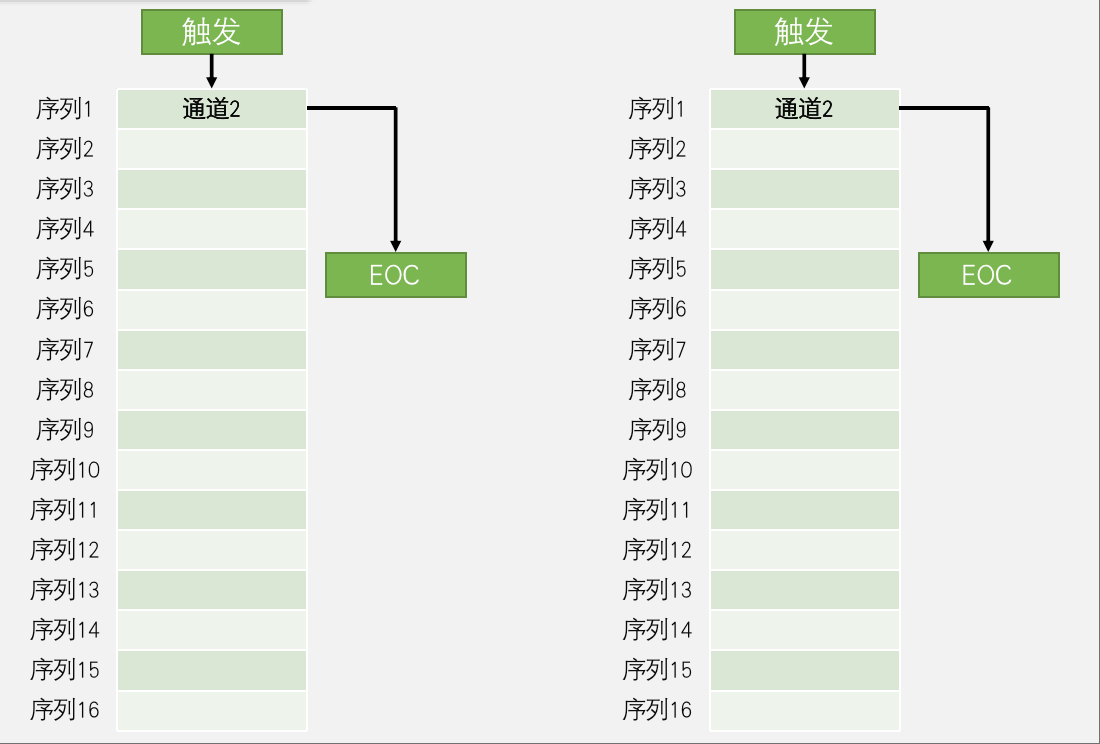
最基础模式:每次调用软件触发,只转换规则组序列 1 上的那一个通道。下文「AD 单通道」即此模式。
连续转换,非扫描模式
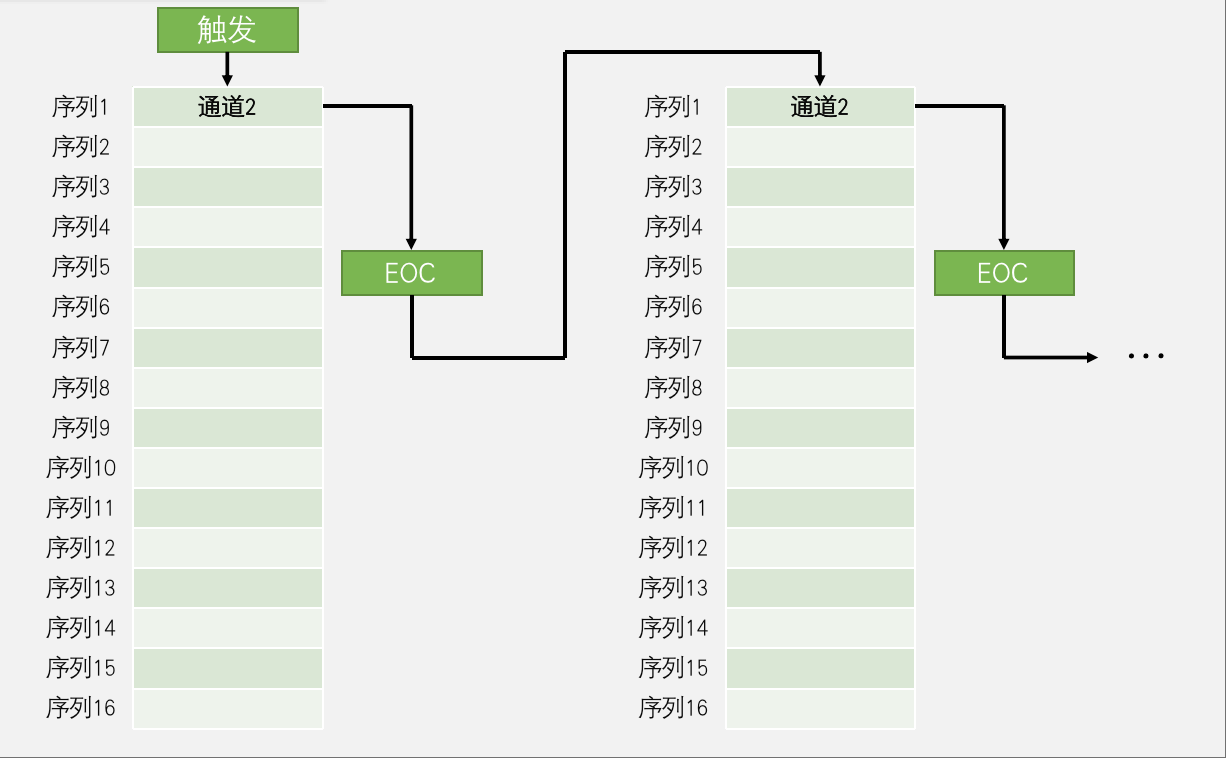
使能 ADC_ContinuousConvMode 后,一次触发即可不停转换同一通道,适合示波器式高速采样或配合 DMA 搬运。
单次转换,扫描模式
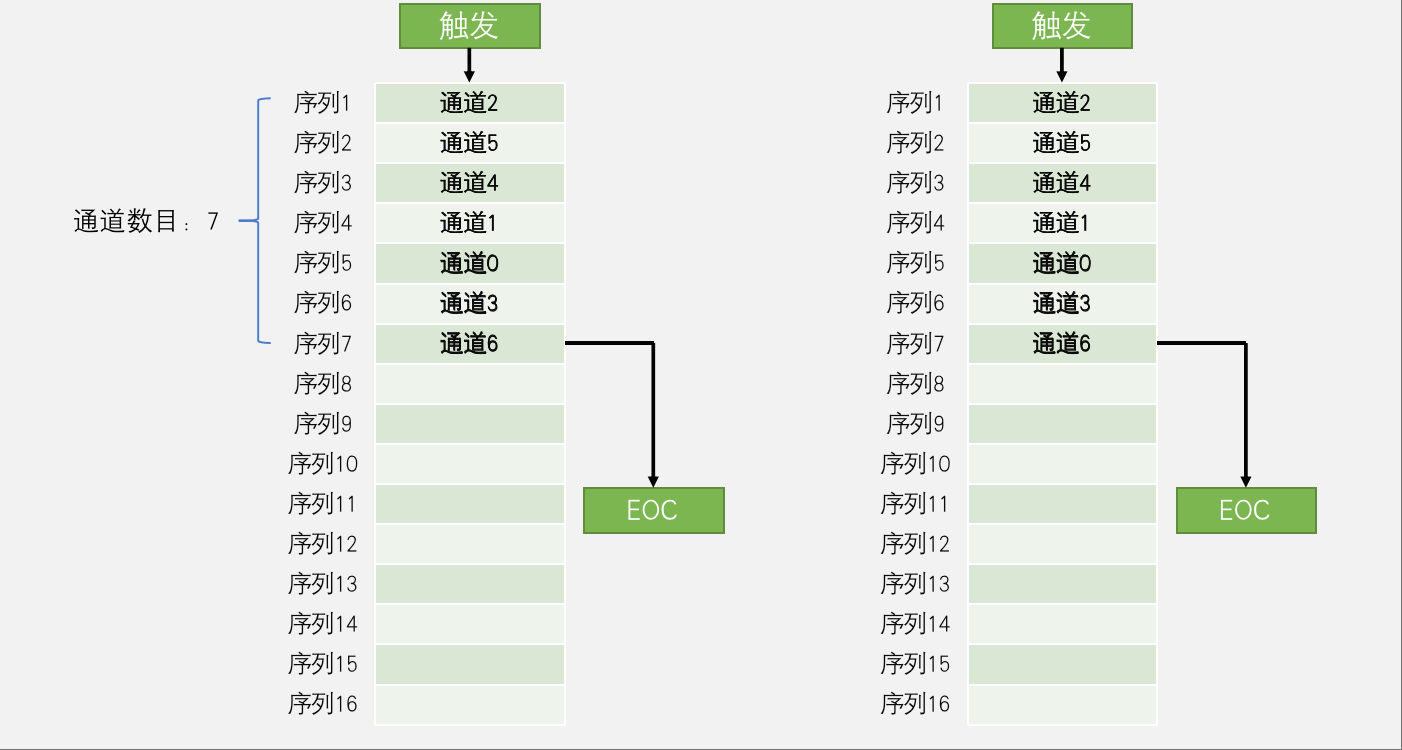
使能 ADC_ScanConvMode 并设置 ADC_NbrOfChannel 为 N,一次触发按序列 1→2→…→N 依次转换,结果需配合 DMA 或逐次读 DR(配合 EOC)。
连续转换,扫描模式
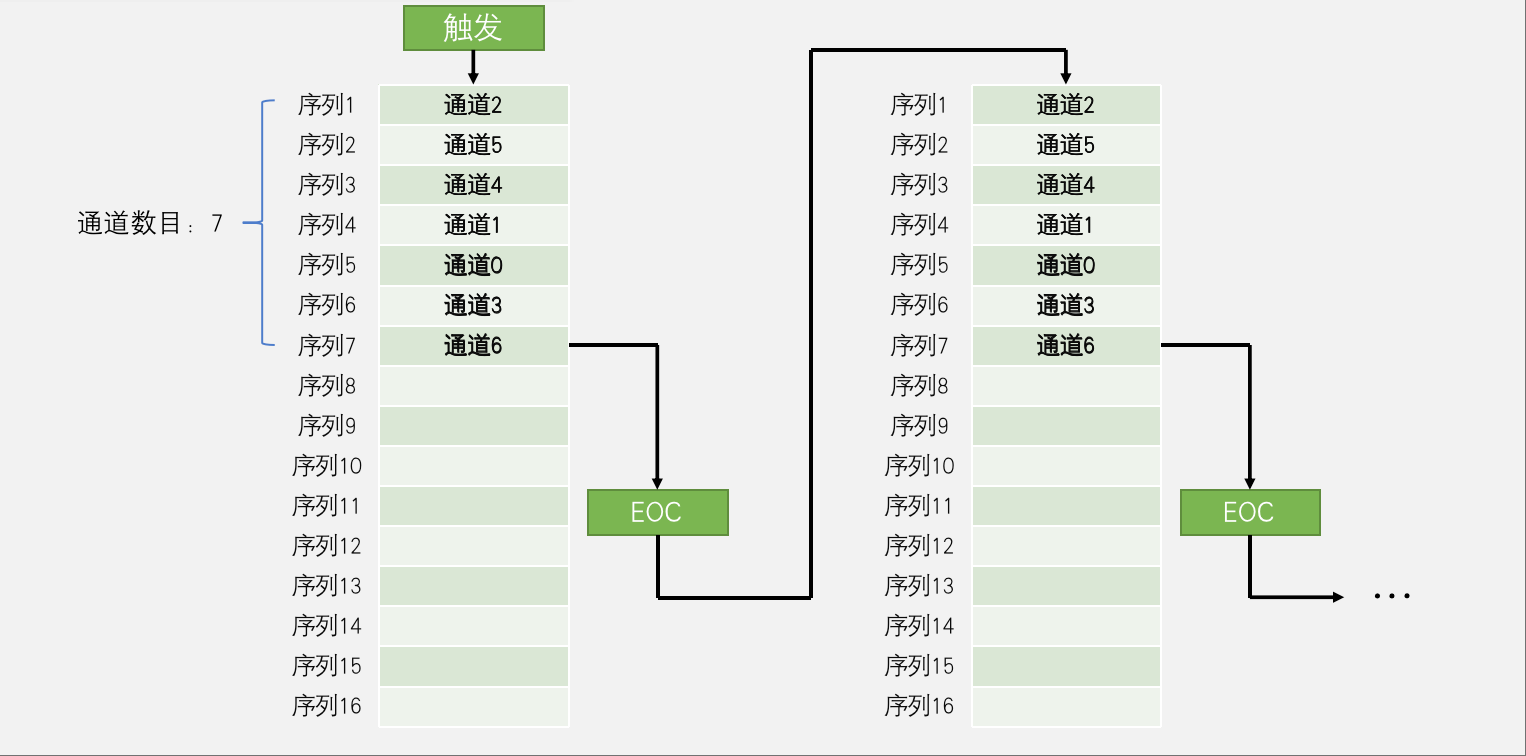
多通道循环采集的常用组合,配合 DMA 将 DR 自动写入数组,CPU 几乎不参与每次读数。
触发控制
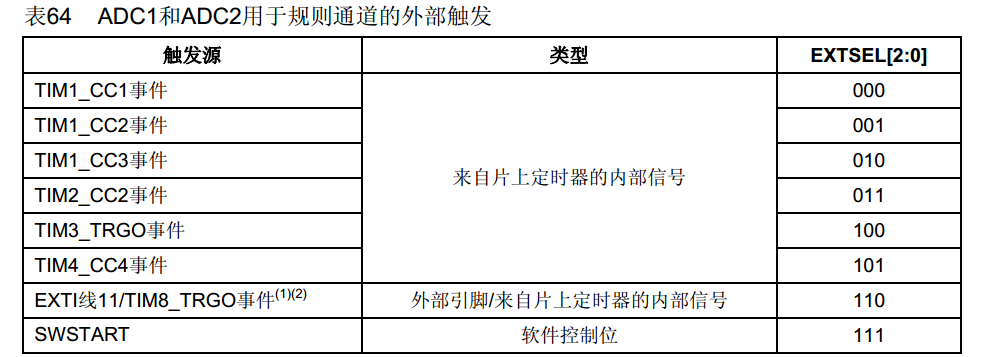
| 触发方式 | 配置 | 场景 |
|---|---|---|
| 软件触发 | ADC_ExternalTrigConv_None + ADC_SoftwareStartConvCmd | 入门、按键后测一次 |
| 硬件触发 | TIM、EXTI 等事件 | 固定采样率、与 PWM 同步 |
软件触发流程:
ADC_SoftwareStartConvCmd(ADC1, ENABLE)
→ 等待 ADC_FLAG_EOC
→ ADC_GetConversionValue(ADC1)数据对齐
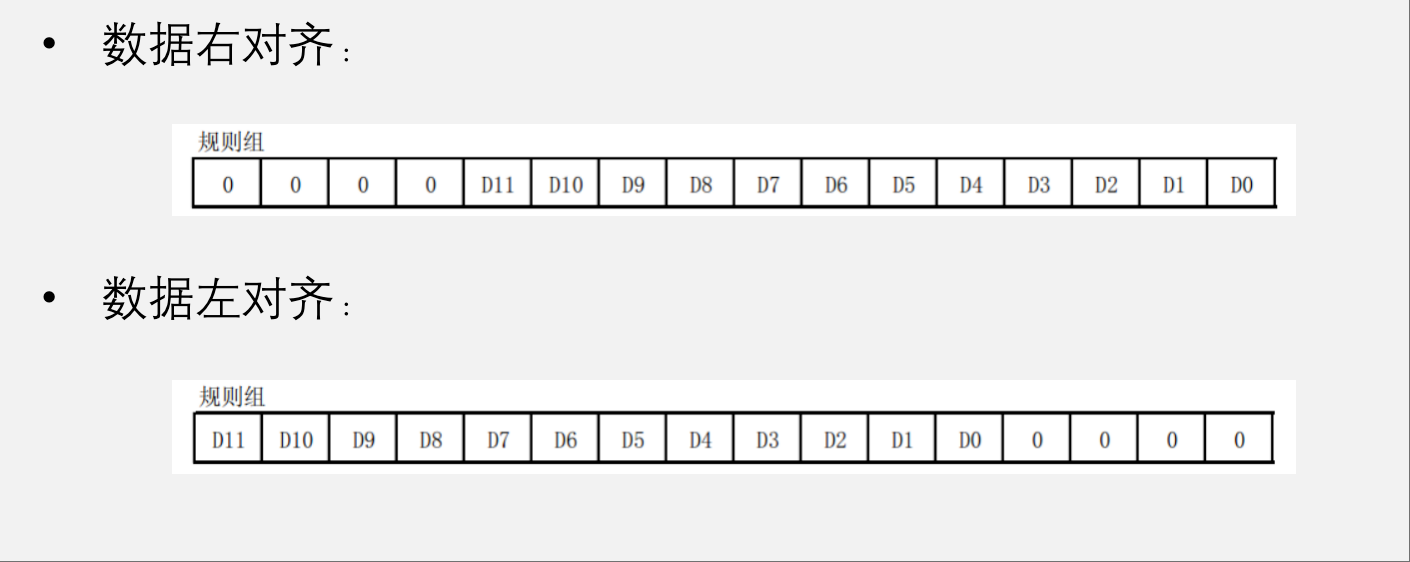
12 位结果可 左对齐 或 右对齐 存放在 16 位数据寄存器中:
| 对齐 | 说明 |
|---|---|
| 右对齐(常用) | 低 12 位有效,值为 0~4095,直接 return ADC_GetConversionValue() |
| 左对齐 | 高 12 位有效,读数需右移,多用于特殊对齐需求 |
示例代码使用 ADC_DataAlign_Right。
ADC 时钟
ADC 挂在 APB2 上,时钟来自 PCLK2,且必须经过分频,ADCCLK 不得超过 14 MHz。
RCC_ADCCLKConfig(RCC_PCLK2_Div6); /* PCLK2=72MHz → ADCCLK=12MHz */| 分频 | PCLK2=72MHz 时 ADCCLK |
|---|---|
| Div2 | 36 MHz ❌ 超限 |
| Div4 | 18 MHz ❌ 超限 |
| Div6 | 12 MHz ✅ 常用 |
| Div8 | 9 MHz ✅ |
江协示例:72 MHz / 6 = 12 MHz,留一定裕量且转换速度较快。
转换时间
ADC 一次完整转换包括:采样时间 + 量化编码时间。
- 采样、保持、量化、编码中,可配置的是采样时间;12.5 个 ADC 周期为固定量化编码阶段(12 位分辨率)。
公式:
例 1:手册常用(ADCCLK = 14 MHz,采样 1.5 周期)
例 2:江协代码(ADCCLK = 12 MHz,采样 55.5 周期)
使用 ADC_SampleTime_55Cycles5:
采样时间越长,对高阻抗信号源(如传感器分压)越有利,但转换速率下降。信号源阻抗大或需要更稳定读数时,可加大采样时间;高速采集则选较短采样时间并注意前端驱动。
常用采样时间常量
| 宏 | 采样周期数 |
|---|---|
ADC_SampleTime_1Cycles5 | 1.5 |
ADC_SampleTime_7Cycles5 | 7.5 |
ADC_SampleTime_13Cycles5 | 13.5 |
ADC_SampleTime_28Cycles5 | 28.5 |
ADC_SampleTime_41Cycles5 | 41.5 |
ADC_SampleTime_55Cycles5 | 55.5 |
ADC_SampleTime_71Cycles5 | 71.5 |
ADC_SampleTime_239Cycles5 | 239.5 |
校准
- STM32 ADC 内置 自校准,补偿内部电容阵列误差,提高精度。
- 建议每次上电后执行一次(使能 ADC 之后、正式采样之前)。
- 启动校准前,ADC 应处于关电状态至少 2 个 ADC 时钟周期(标准库流程已处理)。
固定流程(江协代码同款):
ADC_ResetCalibration(ADC1);
while (ADC_GetResetCalibrationStatus(ADC1) == SET);
ADC_StartCalibration(ADC1);
while (ADC_GetCalibrationStatus(ADC1) == SET);校准期间勿启动转换;校准完成后再进行正常采样。
硬件连接
典型单通道测电压(电位器分压):
3.3V ──┬── 电位器上端
│
├── 滑动端 ── PA0 (ADC1_IN0)
│
GND ───┴── 电位器下端
建议:PA0 近端对 GND 加 100nF 滤波电容(可选,减小抖动)| 要点 | 说明 |
|---|---|
| 电压范围 | 0~3.3 V,禁止负压、超 3.3 V |
| VDDA / VSSA | 与 VDD 共地,模拟电源建议加 LC/RC 滤波 |
| 引脚模式 | GPIO_Mode_AIN,非浮空输入 |
| 驱动能力 | ADC 输入阻抗高,但采样瞬间会充电,高阻信号源需加长采样时间 |
数字量与电压换算
右对齐、12 位、VREF+ = 3.3 V 时:
电压(V) = ADC值 / 4095 × VREF+代码中常用(与 4096 分母差异极小,教程多用 4095):
Voltage = (float)ADValue / 4095.0f * 3.3f;| ADC 值 | 近似电压 |
|---|---|
| 0 | 0 V |
| 2048 | 约 1.65 V |
| 4095 | 约 3.3 V |
1 LSB 约等于 3.3 / 4096 ≈ 0.806 mV。
若需更高精度,可用内部 VREFINT(通道 17) 实测 VDDA 再代入公式,而非死写 3.3 V。
标准库初始化流程
单次、非扫描、软件触发、单通道的推荐顺序:
1. RCC_APB2PeriphClockCmd(ADC1 + GPIOA) /* 开时钟 */
2. RCC_ADCCLKConfig(Div6) /* ADCCLK ≤ 14MHz */
3. GPIO 模拟输入 AIN /* 采集引脚 */
4. ADC_RegularChannelConfig(通道, 序列1, 采样时间)
5. ADC_Init(独立模式, 右对齐, 单次, 非扫描, 软件触发)
6. ADC_Cmd(ENABLE)
7. 校准 ResetCalibration → StartCalibration
8. 采样:SoftwareStartConv → 等 EOC → GetConversionValue代码示例
AD 单通道
硬件:PA0 接模拟电压(0~3.3 V)。
#ifndef __AD_H
#define __AD_H
#include "stm32f10x.h"
void AD_Init(void);
uint16_t AD_GetValue(void);
#endif#include "AD.h"
/**
* @brief ADC1 单通道初始化(PA0 / ADC_Channel_0)
*/
void AD_Init(void)
{
/* 1. 开启 ADC1、GPIOA 时钟 */
RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
/* 2. ADC 时钟:72MHz/6 = 12MHz(不超过 14MHz) */
RCC_ADCCLKConfig(RCC_PCLK2_Div6);
/* 3. PA0 模拟输入 */
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/* 4. 规则组序列 1 绑定通道 0,采样 55.5 周期 */
ADC_RegularChannelConfig(ADC1, ADC_Channel_0, 1, ADC_SampleTime_55Cycles5);
/* 5. ADC 模式:独立、右对齐、软件触发、单次、非扫描 */
ADC_InitTypeDef ADC_InitStructure;
ADC_InitStructure.ADC_Mode = ADC_Mode_Independent;
ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right;
ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None;
ADC_InitStructure.ADC_ContinuousConvMode = DISABLE;
ADC_InitStructure.ADC_ScanConvMode = DISABLE;
ADC_InitStructure.ADC_NbrOfChannel = 1;
ADC_Init(ADC1, &ADC_InitStructure);
/* 6. 使能 ADC */
ADC_Cmd(ADC1, ENABLE);
/* 7. 上电校准(固定流程) */
ADC_ResetCalibration(ADC1);
while (ADC_GetResetCalibrationStatus(ADC1) == SET);
ADC_StartCalibration(ADC1);
while (ADC_GetCalibrationStatus(ADC1) == SET);
}
/**
* @brief 软件触发一次转换,返回 0~4095
*/
uint16_t AD_GetValue(void)
{
ADC_SoftwareStartConvCmd(ADC1, ENABLE);
while (ADC_GetFlagStatus(ADC1, ADC_FLAG_EOC) == RESET);
return ADC_GetConversionValue(ADC1);
}#include "stm32f10x.h"
#include "Delay.h"
#include "AD.h"
uint16_t ADValue;
float Voltage;
int main(void)
{
AD_Init();
while (1)
{
ADValue = AD_GetValue();
Voltage = (float)ADValue / 4095.0f * 3.3f;
/* 通过 OLED / 串口输出 ADValue、Voltage */
Delay_ms(100);
}
}AD 多通道(轮流转换)
硬件:PA0~PA3 分别接四路模拟信号。
思路:不开启扫描模式,每次转换前用 ADC_RegularChannelConfig 改规则组序列 1 的通道,再软件触发。实现简单,适合通道少、速率要求不高的场景。
#ifndef __AD_H
#define __AD_H
#include "stm32f10x.h"
void AD_Init(void);
uint16_t AD_GetValue(uint8_t ADC_Channel);
#endif#include "AD.h"
void AD_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
RCC_ADCCLKConfig(RCC_PCLK2_Div6);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1 | GPIO_Pin_2 | GPIO_Pin_3;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/* 通道在 AD_GetValue 里按次配置,此处不写 RegularChannelConfig */
ADC_InitTypeDef ADC_InitStructure;
ADC_InitStructure.ADC_Mode = ADC_Mode_Independent;
ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right;
ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None;
ADC_InitStructure.ADC_ContinuousConvMode = DISABLE;
ADC_InitStructure.ADC_ScanConvMode = DISABLE;
ADC_InitStructure.ADC_NbrOfChannel = 1;
ADC_Init(ADC1, &ADC_InitStructure);
ADC_Cmd(ADC1, ENABLE);
ADC_ResetCalibration(ADC1);
while (ADC_GetResetCalibrationStatus(ADC1) == SET);
ADC_StartCalibration(ADC1);
while (ADC_GetCalibrationStatus(ADC1) == SET);
}
/**
* @param ADC_Channel ADC_Channel_0~3 对应 PA0~PA3
*/
uint16_t AD_GetValue(uint8_t ADC_Channel)
{
ADC_RegularChannelConfig(ADC1, ADC_Channel, 1, ADC_SampleTime_55Cycles5);
ADC_SoftwareStartConvCmd(ADC1, ENABLE);
while (ADC_GetFlagStatus(ADC1, ADC_FLAG_EOC) == RESET);
return ADC_GetConversionValue(ADC1);
}#include "stm32f10x.h"
#include "Delay.h"
#include "AD.h"
uint16_t AD0, AD1, AD2, AD3;
int main(void)
{
AD_Init();
while (1)
{
AD0 = AD_GetValue(ADC_Channel_0);
AD1 = AD_GetValue(ADC_Channel_1);
AD2 = AD_GetValue(ADC_Channel_2);
AD3 = AD_GetValue(ADC_Channel_3);
/* 换算电压或送显示 */
Delay_ms(100);
}
}多通道采集方式对比
| 方式 | 扫描模式 | DMA | 优点 | 缺点 |
|---|---|---|---|---|
| 轮流单次(上文多通道) | 关 | 否 | 代码简单、易理解 | 通道多时速率慢 |
| 单次扫描 + 轮询 | 开 | 否 | 一次触发采完 N 路 | 需循环读 EOC/DR |
| 连续扫描 + DMA | 开 | 是 | CPU 占用低、速率高 | 配置复杂,见 DMA |
进阶话题
连续转换 + DMA
使能连续 + 扫描,TIM 或软件触发后,DMA 将 ADC1->DR 自动写入 uint16_t buf[N],适合音频、波形采集。需配置 DMA 外设到存储器、半字宽度、循环模式。
内部温度传感器(通道 16)
需使能温度传感器与内部通道,采样时间宜长(如 239.5 周期),并按参考手册公式将 ADC 值换算为摄氏度(与 VDDA、校准参数有关)。
模拟看门狗
设置高低阈值;电压超出范围时产生 AWD 中断,可用于电池欠压报警。
双 ADC 同步
ADC1 + ADC2 同步模式用于提高采样率或交替采样,属进阶内容。
注意事项
- ADCCLK 不得超过 14 MHz,否则结果不可靠。
- 采集引脚必须为模拟输入,不能与数字输出混用同一脚。
- 上电后做校准,正式采样前完成。
- VDDA 与 VDD 共地,模拟电源质量影响精度。
- 输入电压 0~VREF+,超范围可能损坏芯片或读数饱和。
- 轮询 EOC 会阻塞 CPU;高速或多通道优先考虑 DMA。
- 读数抖动时:加长采样时间、硬件滤波电容、软件多次平均。
- 使用 4095 还是 4096 作分母:全量程时 4095 对应 VREF+,与 ST 应用笔记一致;差异约 1 LSB 内。
总结
| 要点 | 说明 |
|---|---|
| 分辨率 | 12 位 → 0~4095 |
| 引脚 | 模拟输入 AIN,查表对应 ADC_Channel_x |
| 时钟 | PCLK2 分频,ADCCLK ≤ 14 MHz |
| 模式 | 入门:单次 + 非扫描 + 软件触发 |
| 流程 | 初始化 → 校准 → 触发 → 等 EOC → 读 DR |
| 电压 | V = ADC / 4095 × 3.3 |
| 多通道 | 轮流改通道(简单)或扫描 + DMA(高效) |