TIM定时器
TIM输出比较
OC(Output Compare)输出比较
输出比较简介
- OC(Output Compare)输出比较
- 输出比较可以通过比较CNT与CCR寄存器值的关系,来对输出电平进行置1、置0或翻转的操作,用于输出一定频率和占空比的PWM波形
- 每个高级定时器和通用定时器都拥有4个输出比较通道
- 高级定时器的前3个通道额外拥有死区生成和互补输出的功能
PWM简介
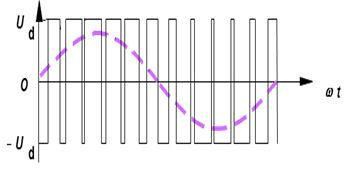
- PWM(Pulse Width Modulation)脉冲宽度调制
- 在具有惯性的系统中,可以通过对一系列脉冲的宽度进行调制,来等效地获得所需要的模拟参量,常应用于电机控速等领域
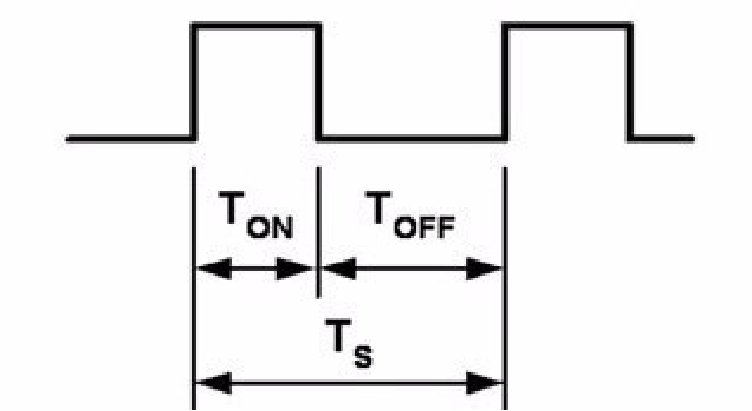
- PWM参数:
- 频率 = 1 / TS
- 占空比 = TON / TS
- 分辨率 = 占空比变化步距
输出比较通道(高级)
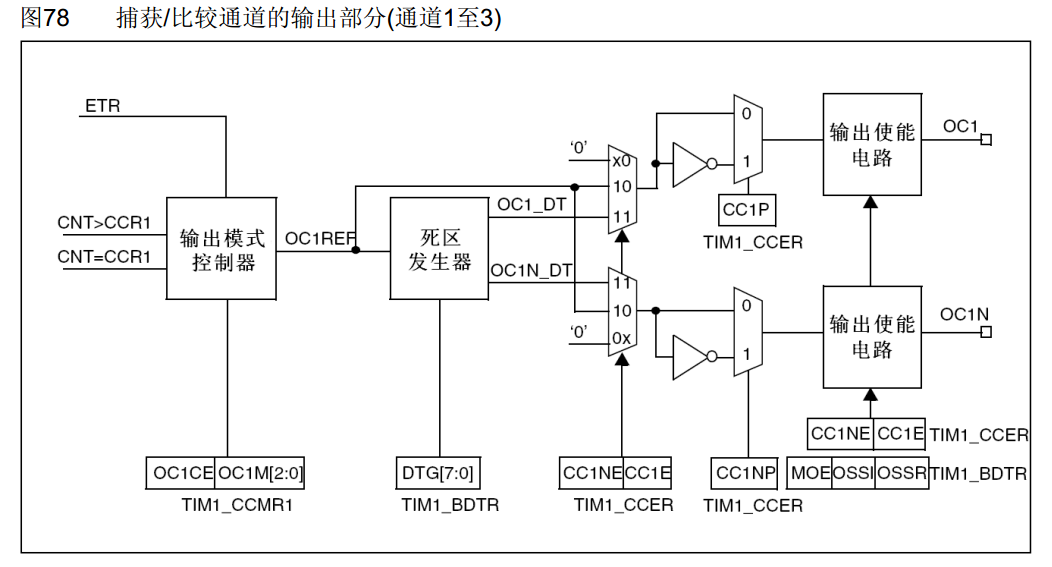
框图解释
这个高级定时器的输出比较通道框图展示了从计数器到最终输出的完整信号路径:
比较器部分
- CNT-CCR1比较器:将定时器计数器值(CNT)与捕获/比较寄存器1(CCR1)进行比较
- 比较结果用于生成输出比较标志(OC1REF)
输出控制
- OC1REF信号:比较器输出的参考信号,根据输出比较模式设置决定其行为
- 极性控制:通过CC1P位控制输出极性(正常或反相)
- 输出使能:通过CC1E位控制通道输出的使能/禁用
高级定时器特有功能
- 互补输出:
- OC1:正常输出通道
- OC1N:互补输出通道(与OC1反相)
- 死区生成器:在OC1和OC1N之间插入死区时间,防止功率器件同时导通
- 刹车功能:通过ETR输入或内部刹车信号,可以立即关闭所有输出
信号流向
- CNT计数器值与CCR1比较
- 生成OC1REF参考信号
- 经过死区生成器处理
- 通过极性和使能控制
- 最终输出到OC1和OC1N引脚
这种结构特别适用于电机控制等需要互补PWM输出和安全保护的应用场合。
输出比较通道(通用)
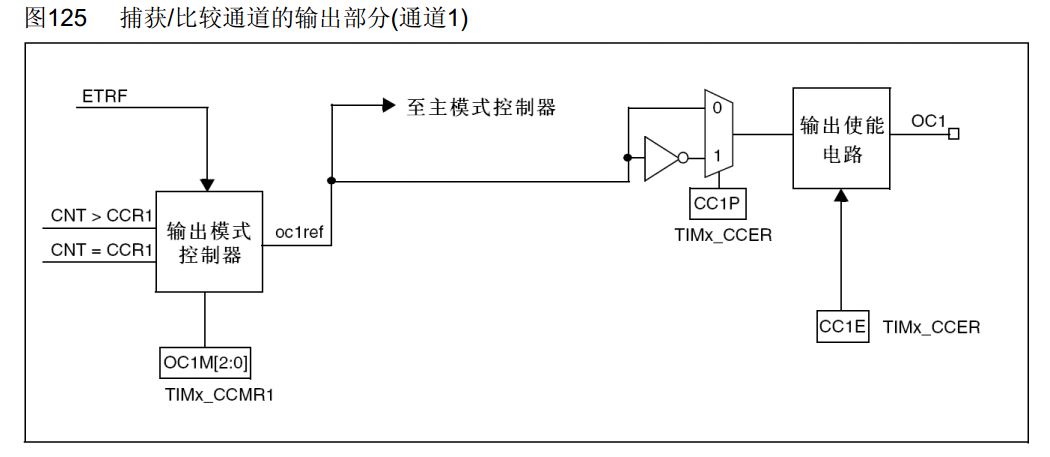
输出比较模式
| 模式 | 描述 |
|---|---|
| 冻结 | CNT=CCR时,REF保持为原状态 |
| 匹配时置有效电平 | CNT=CCR时,REF置有效电平 |
| 匹配时置无效电平 | CNT=CCR时,REF置无效电平 |
| 匹配时电平翻转 | CNT=CCR时,REF电平翻转 |
| 强制为无效电平 | CNT与CCR无效,REF强制为无效电平 |
| 强制为有效电平 | CNT与CCR无效,REF强制为有效电平 |
| PWM模式1 | 向上计数:CNT < CCR时,REF置有效电平,CNT≥CCR时,REF置无效电平 向下计数:CNT>CCR时,REF置有效电平,CNT≤CCR时,REF置无效电平 |
| PWM模式2 | 向上计数:CNT < CCR时,REF置无效电平,CNT≥CCR时,REF置有效电平 向下计数:CNT>CCR时,REF置有效电平,CNT≤CCR时,REF置无效电平 |
PWM基本结构
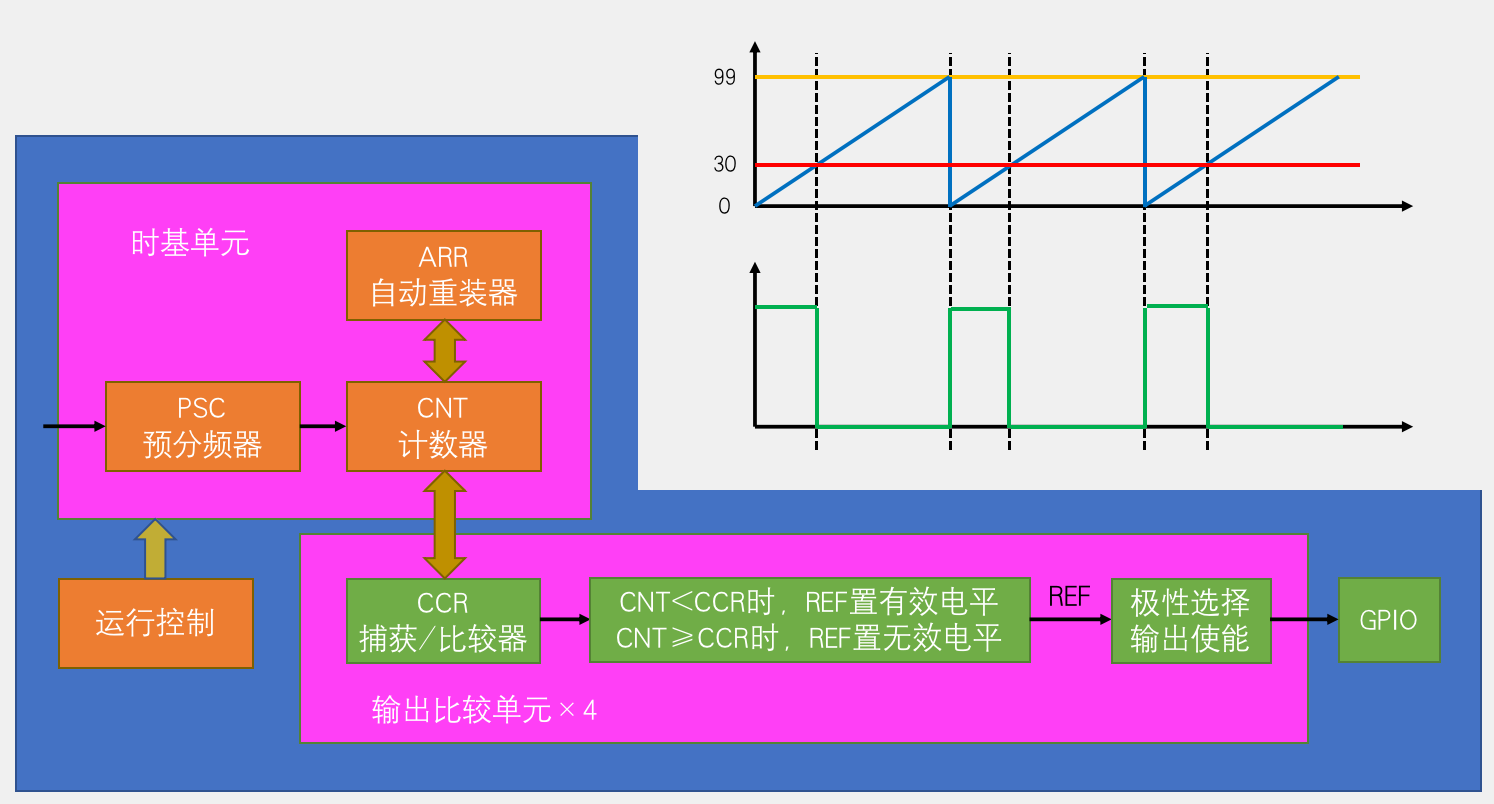
参数计算
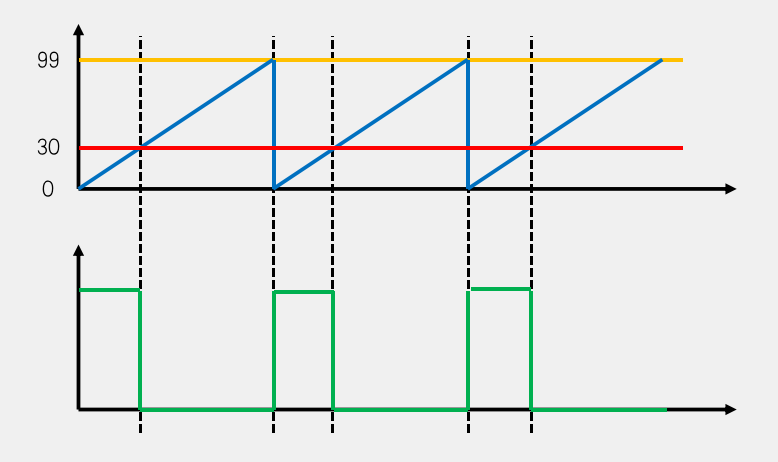
- PWM频率:
Freq = CK_PSC / (PSC + 1) / (ARR + 1) - PWM占空比:
Duty = CCR / (ARR + 1) - PWM分辨率:
Reso = 1 / (ARR + 1)
例子
PWM驱动LED呼吸灯
#ifndef __PWM_H
#define __PWM_H
void PWM_Init(void);
void PWM_SetCompare1(uint16_t Compare);
#endif#include "stm32f10x.h" // Device header
/**
* 函 数:PWM初始化
* 参 数:无
* 返 回 值:无
*/
void PWM_Init(void)
{
/*开启时钟*/
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); //开启TIM2的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启GPIOA的时钟
/*GPIO重映射*/
// RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE); //开启AFIO的时钟,重映射必须先开启AFIO的时钟
// GPIO_PinRemapConfig(GPIO_PartialRemap1_TIM2, ENABLE); //将TIM2的引脚部分重映射,具体的映射方案需查看参考手册
// GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable, ENABLE); //将JTAG引脚失能,作为普通GPIO引脚使用
/*GPIO初始化*/
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; //GPIO_Pin_15;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure); //将PA0引脚初始化为复用推挽输出
//受外设控制的引脚,均需要配置为复用模式
/*配置时钟源*/
TIM_InternalClockConfig(TIM2); //选择TIM2为内部时钟,若不调用此函数,TIM默认也为内部时钟
/*时基单元初始化*/
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure; //定义结构体变量
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; //时钟分频,选择不分频,此参数用于配置滤波器时钟,不影响时基单元功能
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; //计数器模式,选择向上计数
TIM_TimeBaseInitStructure.TIM_Period = 100 - 1; //计数周期,即ARR的值
TIM_TimeBaseInitStructure.TIM_Prescaler = 720 - 1; //预分频器,即PSC的值
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0; //重复计数器,高级定时器才会用到
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure); //将结构体变量交给TIM_TimeBaseInit,配置TIM2的时基单元
/*输出比较初始化*/
TIM_OCInitTypeDef TIM_OCInitStructure; //定义结构体变量
TIM_OCStructInit(&TIM_OCInitStructure); //结构体初始化,若结构体没有完整赋值
//则最好执行此函数,给结构体所有成员都赋一个默认值
//避免结构体初值不确定的问题
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //输出比较模式,选择PWM模式1
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性,选择为高,若选择极性为低,则输出高低电平取反
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //输出使能
TIM_OCInitStructure.TIM_Pulse = 0; //初始的CCR值
TIM_OC1Init(TIM2, &TIM_OCInitStructure); //将结构体变量交给TIM_OC1Init,配置TIM2的输出比较通道1
/*TIM使能*/
TIM_Cmd(TIM2, ENABLE); //使能TIM2,定时器开始运行
}
/**
* 函 数:PWM设置CCR
* 参 数:Compare 要写入的CCR的值,范围:0~100
* 返 回 值:无
* 注意事项:CCR和ARR共同决定占空比,此函数仅设置CCR的值,并不直接是占空比
* 占空比Duty = CCR / (ARR + 1)
*/
void PWM_SetCompare1(uint16_t Compare)
{
TIM_SetCompare1(TIM2, Compare); //设置CCR1的值
}#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "PWM.h"
uint8_t i; //定义for循环的变量
int main(void)
{
/*模块初始化*/
PWM_Init(); //PWM初始化
while (1)
{
for (i = 0; i <= 100; i++)
{
PWM_SetCompare1(i); //依次将定时器的CCR寄存器设置为0~100,PWM占空比逐渐增大,LED逐渐变亮
Delay_ms(10); //延时10ms
}
for (i = 0; i <= 100; i++)
{
PWM_SetCompare1(100 - i); //依次将定时器的CCR寄存器设置为100~0,PWM占空比逐渐减小,LED逐渐变暗
Delay_ms(10); //延时10ms
}
}
}PWM驱动直流电机
#ifndef __MOTOR_H
#define __MOTOR_H
void Motor_Init(void);
void Motor_SetSpeed(uint16_t speed);
void Key_Control(void);
#endif#include "stm32f10x.h" // STM32F1 系列
// 直流电机
void Motor_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE);
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_14;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStruct);
GPIO_InitTypeDef GPIO_InitStruct2;
GPIO_InitStruct2.GPIO_Pin = GPIO_Pin_15;
GPIO_InitStruct2.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStruct2.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStruct2);
GPIO_ResetBits(GPIOB, GPIO_Pin_14);
/*配置时钟源*/
TIM_InternalClockConfig(TIM1); //
/*时基单元初始化*/
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInitStructure.TIM_Period = 100 - 1;
TIM_TimeBaseInitStructure.TIM_Prescaler = 720 - 1;
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;
TIM_TimeBaseInit(TIM1, &TIM_TimeBaseInitStructure);
/*输出比较初始化*/
TIM_OCInitTypeDef TIM_OCInitStructure;
TIM_OCStructInit(&TIM_OCInitStructure);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OCNPolarity = TIM_OCNPolarity_High;
TIM_OCInitStructure.TIM_OutputNState = TIM_OutputNState_Enable;
TIM_OCInitStructure.TIM_OCNIdleState = TIM_OCNIdleState_Reset; // 输出空闲状态
TIM_OCInitStructure.TIM_Pulse = 0;
TIM_OC3Init(TIM1, &TIM_OCInitStructure);
TIM_CtrlPWMOutputs(TIM1, ENABLE); // 使能TIM1的PWM输出(高级定时器需要
TIM_OC3PreloadConfig(TIM1, TIM_OCPreload_Enable); // 使能CCR预装载
TIM_ARRPreloadConfig(TIM1, ENABLE); // 使能ARR预装载
/*TIM使能*/
TIM_Cmd(TIM1, ENABLE);
}
void Motor_SetSpeed(uint16_t speed)
{
TIM_SetCompare3(TIM1, speed);
}
uint8_t KeyNum;
int8_t Speed;
void Key_Control(void)
{
KeyNum = Key_GetNum(); // 获取按键键码
if (KeyNum == 1) // 按键3按下
{
Speed += 20; // 速度变量自增20
if (Speed > 100) // 速度变量超过100后
{
Speed = 0; // 速度变量变为-100
// 此操作会让电机旋转方向突然改变,可能会因供电不足而导致单片机复位
// 若出现了此现象,则应避免使用这样的操作
}
}
Motor_SetSpeed(Speed);
}#include "stm32f10x.h" // STM32F1 系列
#include "Motor.h"
int main(void)
{
Motor_Init();
while (1)
{
Key_Control();
}
}