EXTI
EXTI 外部中断
中断系统
-
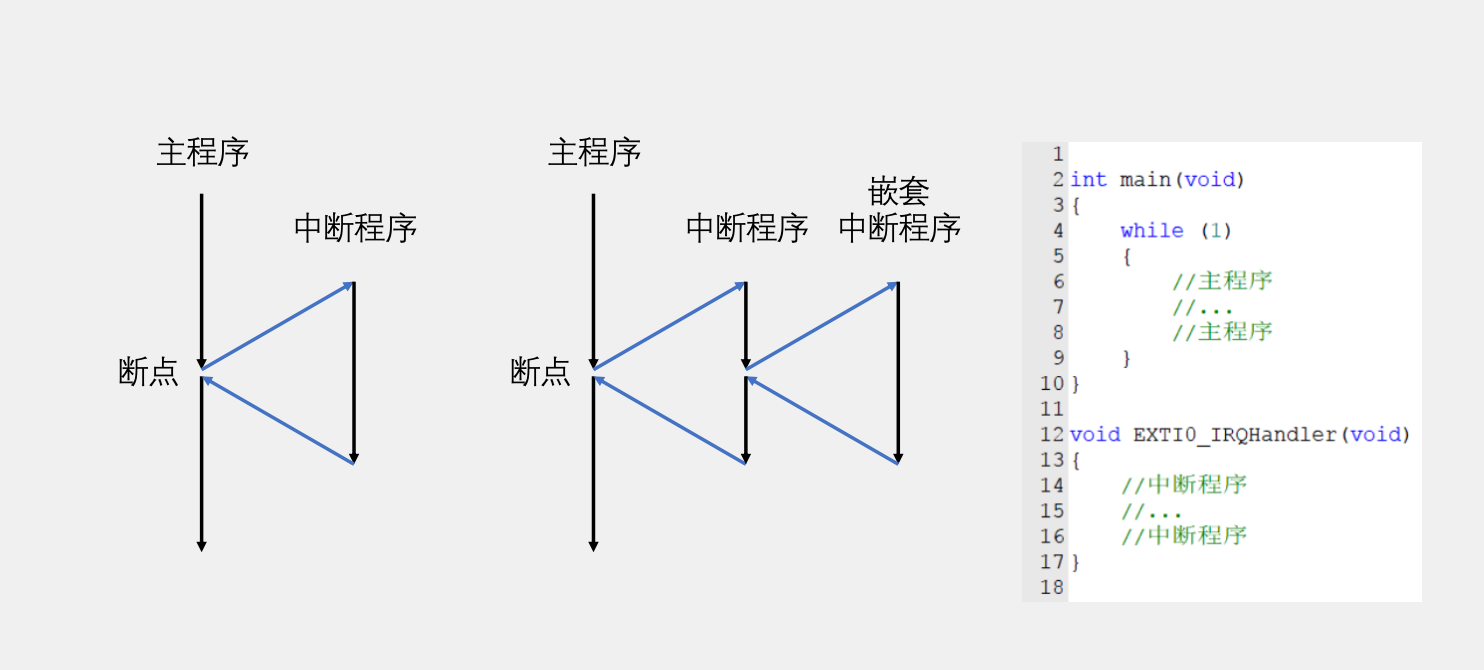
中断:在主程序运行过程中,出现了特定的中断触发条件(中断源),使得CPU暂停当前正在运行的程序,转而去处理中断程序,处理完成后又返回原来被暂停的位置继续运行
-
中断优先级:当有多个中断源同时申请中断时,CPU会根据中断源的轻重缓急进行裁决,优先响应更加紧急的中断源
-
中断嵌套:当一个中断程序正在运行时,又有新的更高优先级的中断源申请中断,CPU再次暂停当前中断程序,转而去处理新的中断程序,处理完成后依次进行返回
中断执行流程
STM32中断
-
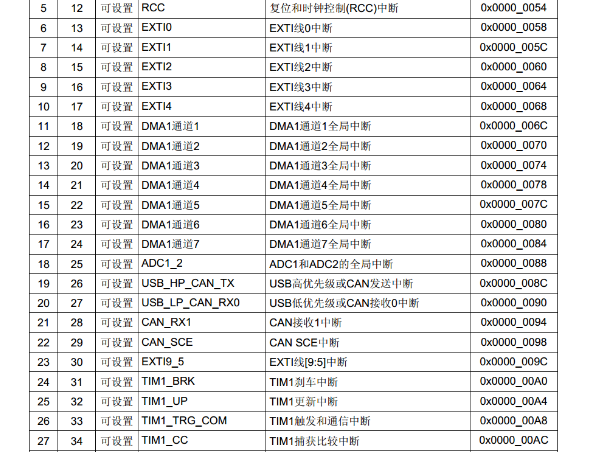
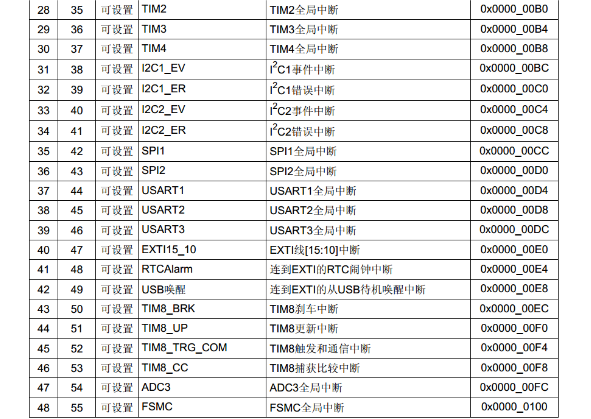
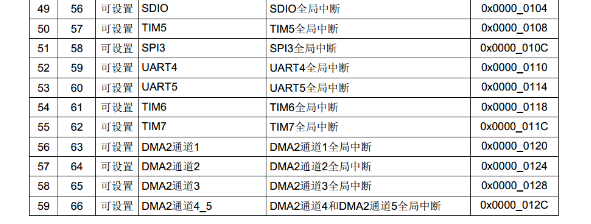
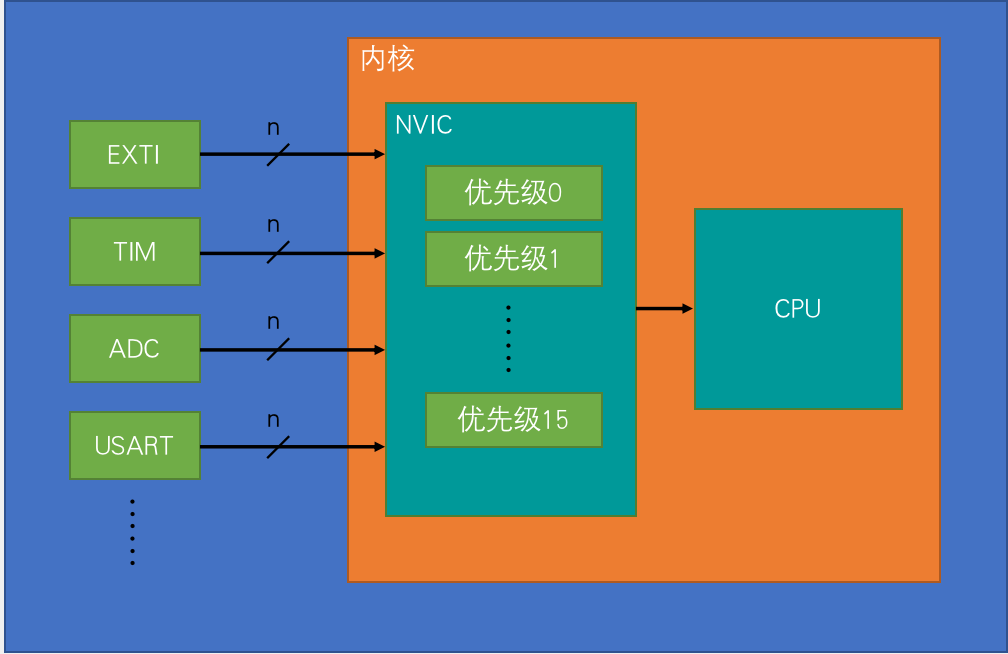
68个可屏蔽中断通道,包含EXTI、TIM、ADC、USART、SPI、I2C、RTC等多个外设
-
使用NVIC统一管理中断,每个中断通道都拥有16个可编程的优先等级,可对优先级进行分组,进一步设置抢占优先级和响应优先级

NVIC基本结构
NVIC优先级分组
-
NVIC的中断优先级由优先级寄存器的4位(0~15)决定,这4位可以进行切分,分为高n位的抢占优先级和低4-n位的响应优先级
-
抢占优先级高的可以中断嵌套,响应优先级高的可以优先排队,抢占优先级和响应优先级均相同的按中断号排队
-
抢占优先级越小,优先级越高;响应优先级越大,优先级越高
| 分组方式 | 抢占优先级 | 响应优先级 |
|---|---|---|
| 分组0 | 0位,取值为0 | 4位,取值为0~15 |
| 分组1 | 1位,取值为0~1 | 3位,取值为0~7 |
| 分组2 | 2位,取值为0~3 | 2位,取值为0~3 |
| 分组3 | 3位,取值为0~7 | 1位,取值为0~1 |
| 分组4 | 4位,取值为0~15 | 0位,取值为0 |
EXTI简介
- EXTI(Extern Interrupt)外部中断
- EXTI可以监测指定GPIO口的电平信号,当其指定的GPIO口产生电平变化时,EXTI将立即向NVIC发出中断申请,经过NVIC裁决后即可中断CPU主程序,使CPU执行EXTI对应的中断程序
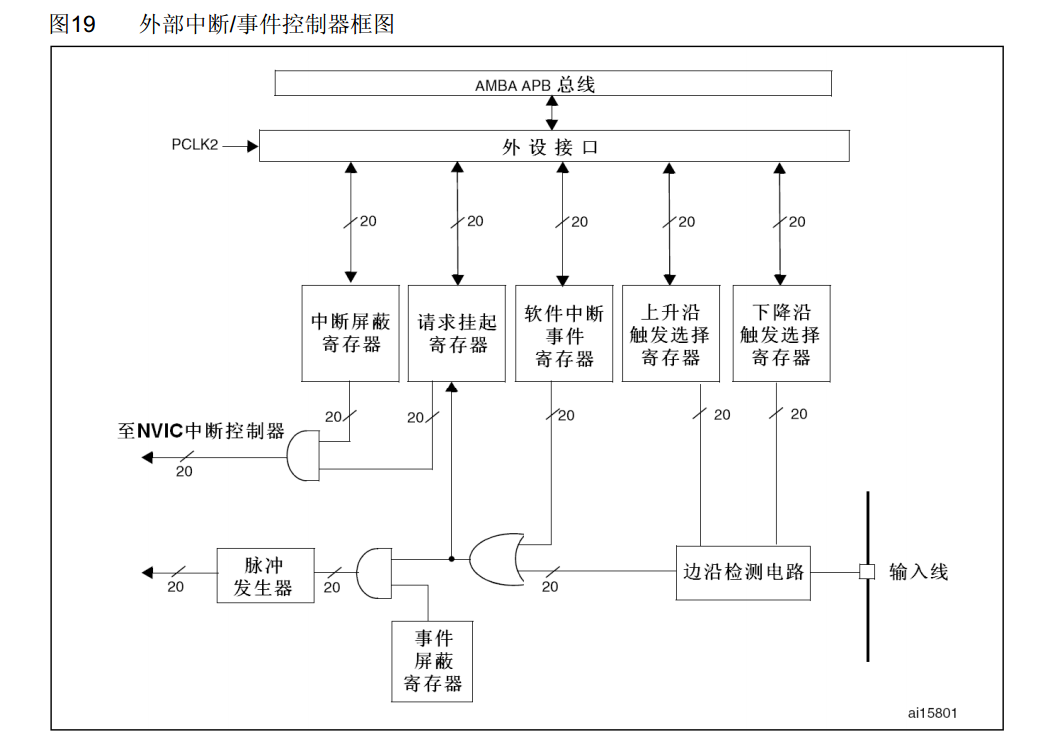
- 支持的触发方式:上升沿/下降沿/双边沿/软件触发
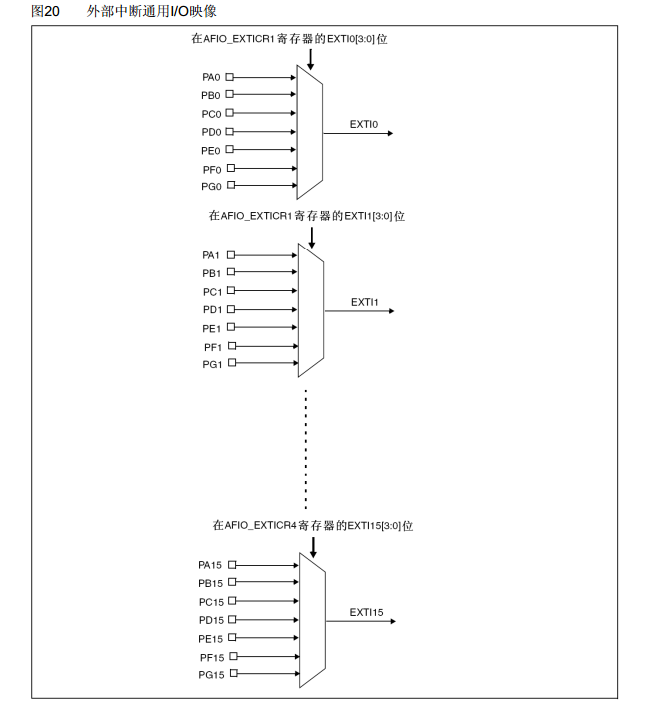
- 支持的GPIO口:所有GPIO口,但相同的Pin不能同时触发中断
- 通道数:16个GPIO_Pin,外加PVD输出、RTC闹钟、USB唤醒、以太网唤醒
- 触发响应方式:中断响应/事件响应
EXTI基本结构
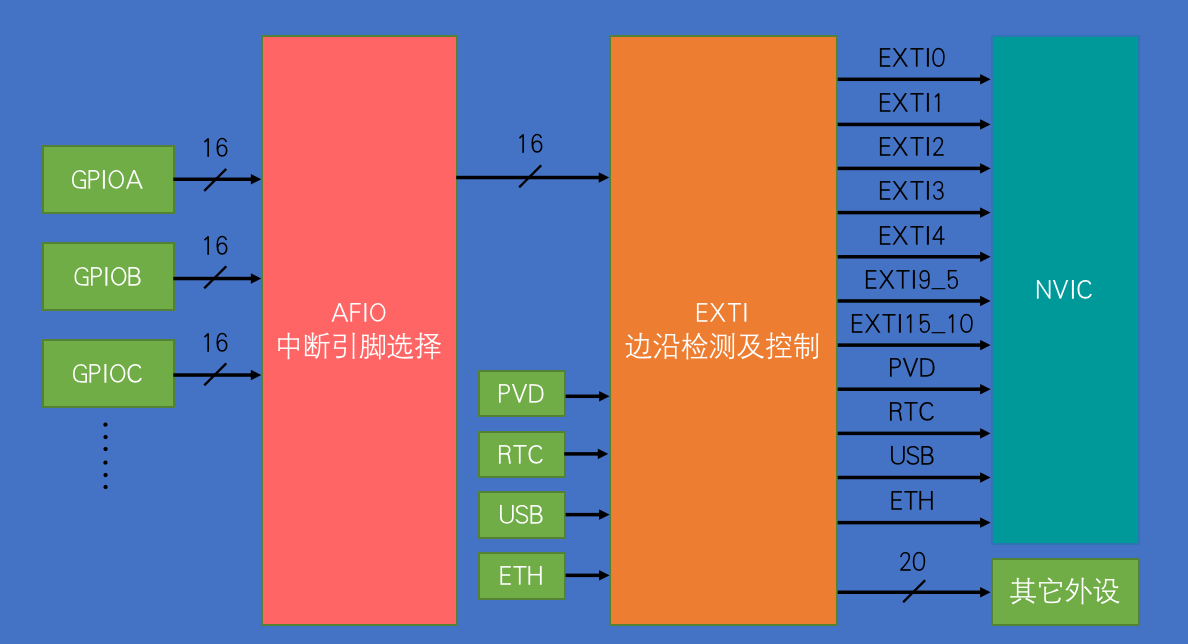
AFIO复用IO口
-
AFIO主要用于引脚复用功能的选择和重定义
-
在STM32中,AFIO主要完成两个任务:复用功能引脚重映射、中断引脚选择
EXTI框图
EXTI 外部中断 STM32 标准库函数介绍
1. 开启时钟
/*开启时钟*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); // 开启GPIOB的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE); // 开启AFIO的时钟,外部中断必须开启AFIO的时钟2. 初始化GPIO
/*GPIO初始化*/
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure); // 将PB0和PB1引脚初始化为上拉输入3. AFIO选择中断引脚
/**
* @brief 选择用作EXTI线路的GPIO引脚。
* @param GPIO_PortSource: 选择作为EXTI线路源的GPIO端口。
* 该参数可以为 GPIO_PortSourceGPIOx,其中x为A到G。
* @param GPIO_PinSource: 指定要配置的EXTI线路。
* 该参数可以为 GPIO_PinSourcex,其中x为0到15。
* @retval 无
*/
void GPIO_EXTILineConfig(uint8_t GPIO_PortSource, uint8_t GPIO_PinSource)/*AFIO选择中断引脚*/
GPIO_EXTILineConfig(GPIO_PortSourceGPIOB, GPIO_PinSource0); // 将外部中断的0号线映射到GPIOB,即选择PB0为外部中断引脚
GPIO_EXTILineConfig(GPIO_PortSourceGPIOB, GPIO_PinSource1); // 将外部中断的1号线映射到GPIOB,即选择PB1为外部中断引脚4. EXTI初始化
typedef struct
{
/*!< 指定要使能或失能的EXTI线路。此参数可以是@ref EXTI_Lines的任意组合 */
uint32_t EXTI_Line;
/*!< 指定EXTI线路的工作模式。此参数可以是@ref EXTIMode_TypeDef的取值
typedef enum
{
EXTI_Mode_Interrupt = 0x00, // 中断模式
EXTI_Mode_Event = 0x04 // 事件模式
}EXTIMode_TypeDef;
*/
EXTIMode_TypeDef EXTI_Mode;
/*!< 指定EXTI线路的触发信号有效边沿。此参数可以是@ref EXTITrigger_TypeDef的取值
typedef enum
{
EXTI_Trigger_Rising = 0x08, // 上升沿触发
EXTI_Trigger_Falling = 0x0C, // 下降沿触发
EXTI_Trigger_Rising_Falling = 0x10 // 上升沿和下降沿触发
}EXTITrigger_TypeDef;
*/
EXTITrigger_TypeDef EXTI_Trigger;
/*!< 指定所选EXTI线路的新状态。此参数可以设置为ENABLE或DISABLE */
FunctionalState EXTI_LineCmd;
}EXTI_InitTypeDef;/**
* @brief 根据EXTI_InitStruct中指定的参数初始化EXTI外设。
* @param EXTI_InitStruct: 指向EXTI_InitTypeDef结构体的指针,
* 该结构体包含了EXTI外设的配置信息。
* @retval 无
*/
void EXTI_Init(EXTI_InitTypeDef* EXTI_InitStruct)/*EXTI初始化*/
EXTI_InitTypeDef EXTI_InitStructure; // 定义结构体变量
EXTI_InitStructure.EXTI_Line = EXTI_Line0 | EXTI_Line1; // 选择配置外部中断的0号线和1号线
EXTI_InitStructure.EXTI_LineCmd = ENABLE; // 指定外部中断线使能
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt; // 指定外部中断线为中断模式
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling; // 指定外部中断线为下降沿触发
EXTI_Init(&EXTI_InitStructure); // 将结构体变量交给EXTI_Init,配置EXTI外设NVIC
/**
配置NVIC为分组2
即抢占优先级范围:0~3,响应优先级范围:0~3
此分组配置在整个工程中仅需调用一次
若有多个中断,可以把此代码放在main函数内,while循环之前
若调用多次配置分组的代码,则后执行的配置会覆盖先执行的配置
*/
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); typedef struct
{
uint8_t NVIC_IRQChannel; /*!< 指定要使能或失能的中断通道。
此参数可以是 @ref IRQn_Type 的取值
(完整的STM32设备中断通道列表请参考 stm32f10x.h 文件) */
uint8_t NVIC_IRQChannelPreemptionPriority; /*!< 指定 NVIC_IRQChannel 所选中断通道的抢占优先级。
此参数的取值范围为0~15,具体请参考 @ref NVIC_Priority_Table 表格 */
uint8_t NVIC_IRQChannelSubPriority; /*!< 指定 NVIC_IRQChannel 所选中断通道的响应优先级(子优先级)。
此参数的取值范围为0~15,具体请参考 @ref NVIC_Priority_Table 表格 */
FunctionalState NVIC_IRQChannelCmd; /*!< 指定 NVIC_IRQChannel 所定义的中断通道是否使能。
此参数可以设置为 ENABLE 或 DISABLE */
} NVIC_InitTypeDef;NVIC_InitTypeDef NVIC_InitStructure; // 定义结构体变量
NVIC_InitStructure.NVIC_IRQChannel = EXTI0_IRQn; // 选择配置NVIC的EXTI0线
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; // 指定NVIC线路使能
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1; // 指定NVIC线路的抢占优先级为1
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; // 指定NVIC线路的响应优先级为1
NVIC_Init(&NVIC_InitStructure); // 将结构体变量交给NVIC_Init,配置NVIC外设
NVIC_InitStructure.NVIC_IRQChannel = EXTI1_IRQn; // 选择配置NVIC的EXTI1线
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; // 指定NVIC线路使能
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1; // 指定NVIC线路的抢占优先级为1
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2; // 指定NVIC线路的响应优先级为2
NVIC_Init(&NVIC_InitStructure); 中断函数
/**
* 函 数:EXTI0外部中断函数
* 参 数:无
* 返 回 值:无
* 注意事项:此函数为中断函数,无需调用,中断触发后自动执行
* 函数名为预留的指定名称,可以从启动文件复制
* 请确保函数名正确,不能有任何差异,否则中断函数将不能进入
*/
void EXTI0_IRQHandler(void)
{
if (EXTI_GetITStatus(EXTI_Line0) == SET) // 判断是否是外部中断0号线触发的中断
{
// 中断处理代码
EXTI_ClearITPendingBit(EXTI_Line0); // 清除外部中断0号线的中断标志位
// 中断标志位必须清除
// 否则中断将连续不断地触发,导致主程序卡死
}
}
// 其他中断函数同理代码实例
对射式红外传感器计次
#ifndef __COUNT_SENSOR_H
#define __COUNT_SENSOR_H
void CountSensor_Init(void);
uint16_t CountSensor_Get(void);
#endif#include "stm32f10x.h" // Device header
uint16_t CountSensor_Count; //全局变量,用于计数
/**
* 函 数:计数传感器初始化
* 参 数:无
* 返 回 值:无
*/
void CountSensor_Init(void)
{
/*开启时钟*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //开启GPIOB的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE); //开启AFIO的时钟,外部中断必须开启AFIO的时钟
/*GPIO初始化*/
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_14;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure); //将PB14引脚初始化为上拉输入
/*AFIO选择中断引脚*/
GPIO_EXTILineConfig(GPIO_PortSourceGPIOB, GPIO_PinSource14);//将外部中断的14号线映射到GPIOB,即选择PB14为外部中断引脚
/*EXTI初始化*/
EXTI_InitTypeDef EXTI_InitStructure; //定义结构体变量
EXTI_InitStructure.EXTI_Line = EXTI_Line14; //选择配置外部中断的14号线
EXTI_InitStructure.EXTI_LineCmd = ENABLE; //指定外部中断线使能
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt; //指定外部中断线为中断模式
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling; //指定外部中断线为下降沿触发
EXTI_Init(&EXTI_InitStructure); //将结构体变量交给EXTI_Init,配置EXTI外设
/*NVIC中断分组*/
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //配置NVIC为分组2
//即抢占优先级范围:0~3,响应优先级范围:0~3
//此分组配置在整个工程中仅需调用一次
//若有多个中断,可以把此代码放在main函数内,while循环之前
//若调用多次配置分组的代码,则后执行的配置会覆盖先执行的配置
/*NVIC配置*/
NVIC_InitTypeDef NVIC_InitStructure; //定义结构体变量
NVIC_InitStructure.NVIC_IRQChannel = EXTI15_10_IRQn; //选择配置NVIC的EXTI15_10线
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //指定NVIC线路使能
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1; //指定NVIC线路的抢占优先级为1
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; //指定NVIC线路的响应优先级为1
NVIC_Init(&NVIC_InitStructure); //将结构体变量交给NVIC_Init,配置NVIC外设
}
/**
* 函 数:获取计数传感器的计数值
* 参 数:无
* 返 回 值:计数值,范围:0~65535
*/
uint16_t CountSensor_Get(void)
{
return CountSensor_Count;
}
/**
* 函 数:EXTI15_10外部中断函数
* 参 数:无
* 返 回 值:无
* 注意事项:此函数为中断函数,无需调用,中断触发后自动执行
* 函数名为预留的指定名称,可以从启动文件复制
* 请确保函数名正确,不能有任何差异,否则中断函数将不能进入
*/
void EXTI15_10_IRQHandler(void)
{
if (EXTI_GetITStatus(EXTI_Line14) == SET) //判断是否是外部中断14号线触发的中断
{
/*如果出现数据乱跳的现象,可再次判断引脚电平,以避免抖动*/
if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_14) == 0)
{
CountSensor_Count ++; //计数值自增一次
}
EXTI_ClearITPendingBit(EXTI_Line14); //清除外部中断14号线的中断标志位
//中断标志位必须清除
//否则中断将连续不断地触发,导致主程序卡死
}
}#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "CountSensor.h"
int main(void)
{
/*模块初始化*/
OLED_Init(); //OLED初始化
CountSensor_Init(); //计数传感器初始化
/*显示静态字符串*/
OLED_ShowString(1, 1, "Count:"); //1行1列显示字符串Count:
while (1)
{
OLED_ShowNum(1, 7, CountSensor_Get(), 5); //OLED不断刷新显示CountSensor_Get的返回值
}
}旋转编码器
#ifndef __ENCODER_H
#define __ENCODER_H
void Encoder_Init(void);
int16_t Encoder_Get(void);
#endif#include "stm32f10x.h"
int16_t Encoder_Count; // 全局变量,用于计数旋转编码器的增量值
/**
* 函 数:旋转编码器初始化
* 参 数:无
* 返 回 值:无
*/
void Encoder_Init(void)
{
/*开启时钟*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); // 开启GPIOB的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE); // 开启AFIO的时钟,外部中断必须开启AFIO的时钟
/*GPIO初始化*/
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure); // 将PB0和PB1引脚初始化为上拉输入
/*AFIO选择中断引脚*/
GPIO_EXTILineConfig(GPIO_PortSourceGPIOB, GPIO_PinSource0); // 将外部中断的0号线映射到GPIOB,即选择PB0为外部中断引脚
GPIO_EXTILineConfig(GPIO_PortSourceGPIOB, GPIO_PinSource1); // 将外部中断的1号线映射到GPIOB,即选择PB1为外部中断引脚
/*EXTI初始化*/
EXTI_InitTypeDef EXTI_InitStructure; // 定义结构体变量
EXTI_InitStructure.EXTI_Line = EXTI_Line0 | EXTI_Line1; // 选择配置外部中断的0号线和1号线
EXTI_InitStructure.EXTI_LineCmd = ENABLE; // 指定外部中断线使能
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt; // 指定外部中断线为中断模式
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling; // 指定外部中断线为下降沿触发
EXTI_Init(&EXTI_InitStructure); // 将结构体变量交给EXTI_Init,配置EXTI外设
/*NVIC中断分组*/
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); // 配置NVIC为分组2
// 即抢占优先级范围:0~3,响应优先级范围:0~3
// 此分组配置在整个工程中仅需调用一次
// 若有多个中断,可以把此代码放在main函数内,while循环之前
// 若调用多次配置分组的代码,则后执行的配置会覆盖先执行的配置
/*NVIC配置*/
NVIC_InitTypeDef NVIC_InitStructure; // 定义结构体变量
NVIC_InitStructure.NVIC_IRQChannel = EXTI0_IRQn; // 选择配置NVIC的EXTI0线
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; // 指定NVIC线路使能
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1; // 指定NVIC线路的抢占优先级为1
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; // 指定NVIC线路的响应优先级为1
NVIC_Init(&NVIC_InitStructure); // 将结构体变量交给NVIC_Init,配置NVIC外设
NVIC_InitStructure.NVIC_IRQChannel = EXTI1_IRQn; // 选择配置NVIC的EXTI1线
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; // 指定NVIC线路使能
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1; // 指定NVIC线路的抢占优先级为1
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2; // 指定NVIC线路的响应优先级为2
NVIC_Init(&NVIC_InitStructure); // 将结构体变量交给NVIC_Init,配置NVIC外设
}
/**
* 函 数:旋转编码器获取增量值
* 参 数:无
* 返 回 值:自上此调用此函数后,旋转编码器的增量值
*/
int16_t Encoder_Get(void)
{
/*使用Temp变量作为中继,目的是返回Encoder_Count后将其清零*/
/*在这里,也可以直接返回Encoder_Count
但这样就不是获取增量值的操作方法了
也可以实现功能,只是思路不一样*/
int16_t Temp;
Temp = Encoder_Count;
Encoder_Count = 0;
return Temp;
}
/**
* 函 数:EXTI0外部中断函数
* 参 数:无
* 返 回 值:无
* 注意事项:此函数为中断函数,无需调用,中断触发后自动执行
* 函数名为预留的指定名称,可以从启动文件复制
* 请确保函数名正确,不能有任何差异,否则中断函数将不能进入
*/
void EXTI0_IRQHandler(void)
{
if (EXTI_GetITStatus(EXTI_Line0) == SET) // 判断是否是外部中断0号线触发的中断
{
/*如果出现数据乱跳的现象,可再次判断引脚电平,以避免抖动*/
if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_0) == 0)
{
if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_1) == 0) // PB0的下降沿触发中断,此时检测另一相PB1的电平,目的是判断旋转方向
{
Encoder_Count--; // 此方向定义为反转,计数变量自减
// Serial_Printf("\r\nEncoder=%d", Encoder_Count);
}
}
EXTI_ClearITPendingBit(EXTI_Line0); // 清除外部中断0号线的中断标志位
// 中断标志位必须清除
// 否则中断将连续不断地触发,导致主程序卡死
}
}
/**
* 函 数:EXTI1外部中断函数
* 参 数:无
* 返 回 值:无
* 注意事项:此函数为中断函数,无需调用,中断触发后自动执行
* 函数名为预留的指定名称,可以从启动文件复制
* 请确保函数名正确,不能有任何差异,否则中断函数将不能进入
*/
void EXTI1_IRQHandler(void)
{
if (EXTI_GetITStatus(EXTI_Line1) == SET) // 判断是否是外部中断1号线触发的中断
{
/*如果出现数据乱跳的现象,可再次判断引脚电平,以避免抖动*/
if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_1) == 0)
{
if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_0) == 0) // PB1的下降沿触发中断,此时检测另一相PB0的电平,目的是判断旋转方向
{
Encoder_Count++; // 此方向定义为正转,计数变量自增
// Serial_Printf("\r\nEncoder=%d", Encoder_Count);
}
}
EXTI_ClearITPendingBit(EXTI_Line1); // 清除外部中断1号线的中断标志位
// 中断标志位必须清除
// 否则中断将连续不断地触发,导致主程序卡死
}
}